Quiero comentar también que nosotros somos unos novatos en todo esto y mucho más en el mundo de la electrónica, por lo que, seguramente cometeremos muchos fallos y diremos mas de una tontería: ¡No os cortéis ! ¡corregidnos!
Desde este blog queremos ayudar con lo poco que vamos aprendiendo a los que, como nosotros, están empezando, que quieren entender los conceptos y ya se ocuparan mas tarde de la teoría, por lo que puede resultar un poco básico (o no). En fin, ¡¡empecemos!!
Sensores IR
Para este proyecto, estamos utilizando el "Kit de Robótica de bq", en el cual tenemos dos sensores IR, ideales para realizar proyectos de robots siguelineas.

Pero ¿que es un sensor IR? IR significa "InfraRed" ,o sea, que un sensor IR es un sensor que tiene algo que ver con los infrarrojos (elemental querido Watson).
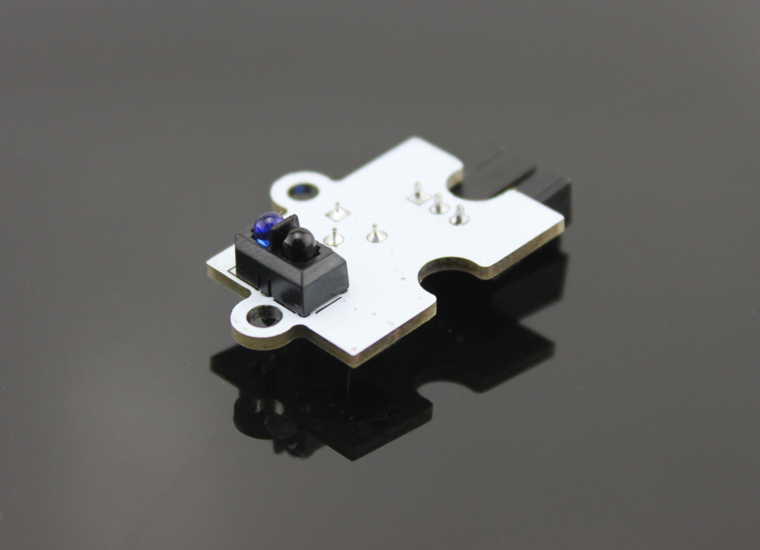
Los sensores que vamos a utilizar tienen una combinación de dos especies de LED, uno es un emisor y el otro un receptor. El emisor es un diodo LED infrarrojo, o lo que es lo mismo, un LED que emite luz infrarroja que es invisible para el ojo humano. El receptor es un fototransistor (menos mal que he dicho que me iba a alejar de tecnicismos) que mide la radiación infrarroja que le llega.
Voy a intentarlo de nuevo, el emisor, como su nombre indica, emite luz infrarroja y el receptor mide la cantidad que le llega de dicha luz después de reflejarse en una superficie. De esta forma, cuando el sensor se encuentra sobre una superficie negra (el negro absorbe la luz cual vampiro sediento y no deja reflejarse nada) el receptor nos "mide" la cantidad de luz reflejada como 0 (cero patatero, no se refleja nada de luz). Sin embargo, si el sensor se encuentra sobre una superficie que no es negra, siempre se refleja algo de la luz infrarroja y por tanto el receptor nos da un valor igual a 1 (se refleja la luz).

Implementación
Vayamos ahora a explicar como lo hemos implementado.
Ya hemos dicho que vamos a utilizar 2 sensores IR para siguelineas, los cuales montaremos en paralelo uno pegado al otro.

Si observamos el esquema anterior veremos como actuaremos en cada uno de los casos. En la primera imagen vemos que la linea gira hacia la derecha y que lo detectamos porque el sensor izquierdo nos dará un valor 1 que nos indica que está sobre una superficie blanca, mientras el sensor izquierdo continua sobre la línea negra y nos sigue devolviendo el valor 0. En el caso de que el giro o curva sea hacia la izquierda, los valores de los sensores son los contrarios.
En fin, teniendo en cuenta todo esto, hemos montado y programado nuestro robot y aquí os dejamos un video.
Un comentario mas, como la linea que dibujamos en nuestro circuito era un poco estrecha, el robot iba todo el rato cabeceando de izquierda a derecha, ya que en todo momento había un sensor fuera de la línea. Otro problema que teníamos es que en algunas curvas, los dos sensores quedaban fuera de la línea y el robot se paraba. Por todo ello, hemos añadido una rutina en el programa para que el robot vuelva a buscar la línea cuando la pierda.
Puedes ver el código aquí
No hay comentarios:
Publicar un comentario